A virtual training ground
A group of engineering students at the University of British Columbia in Canada built an air‑hockey robot that competes against human opponents without ever having touched a physical table.
The system relies on a reinforcement learning algorithm called soft actor‑critic, which rewards successful shots and penalizes missed ones. By running millions of simulated matches, the robot learns to anticipate the puck’s trajectory and adjust its paddle movements.
To make the simulation realistic, the developers introduced random variations such as uneven rail surfaces and fluctuating power levels, a technique known as domain randomization. This forces the model to become robust enough to handle the quirks of the real world.
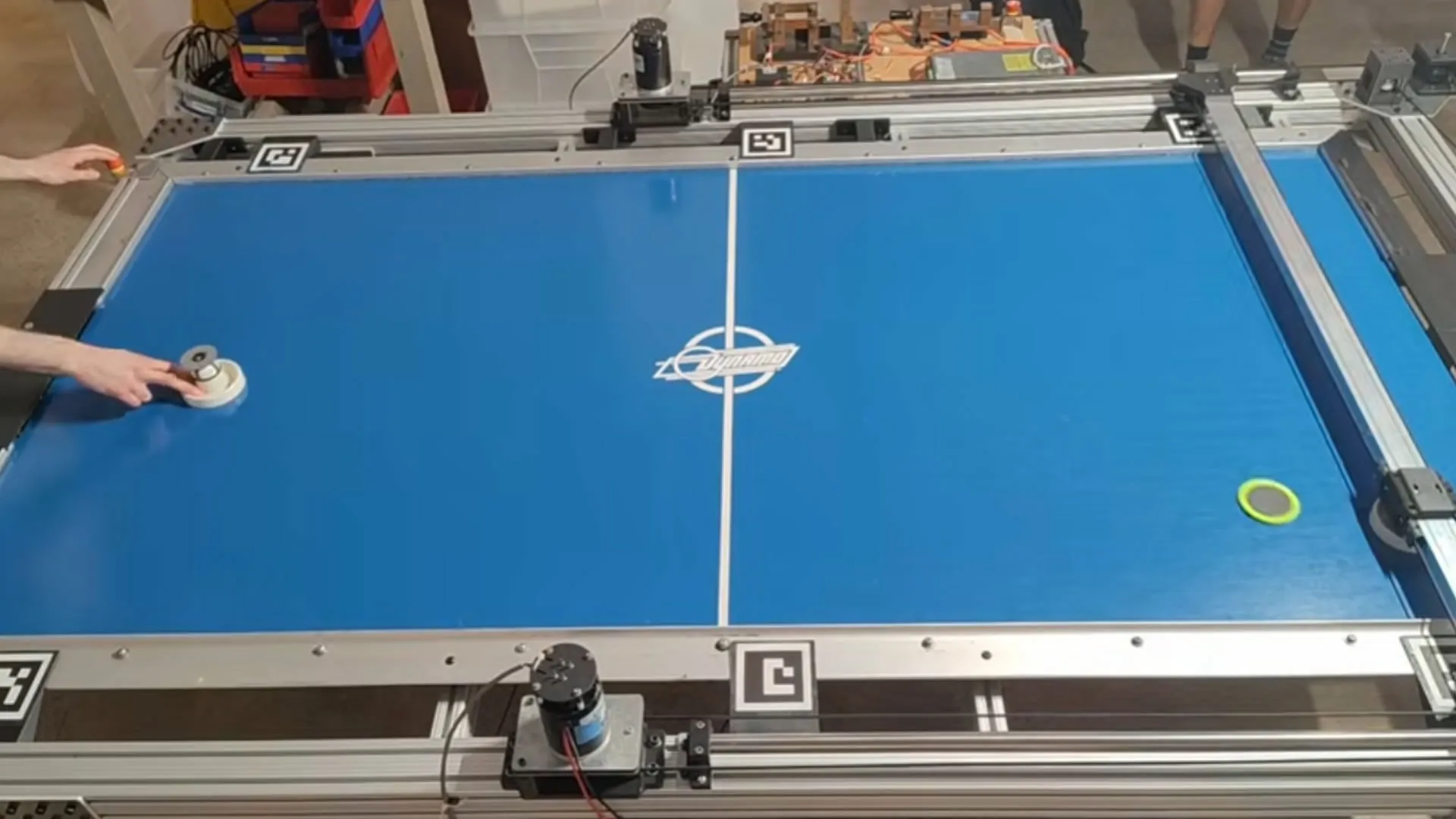
An overhead camera paired with a puck coated in retroreflective tape provides precise tracking, while the robot’s actuators execute rapid strikes. In head‑to‑head tests, the machine posted a win rate that surprised both the team and external observers.
From simulation to real‑world applications
Although the experiment focuses on a playful contest, the underlying methodology could streamline training for other autonomous systems. Drones, self‑driving cars and industrial robots often struggle with unpredictable environments, and exposing them to randomized conditions during learning may reduce the gap between virtual practice and field deployment.
The researchers have made their code publicly available on GitHub, inviting other developers to experiment with similar approaches and potentially adapt the technique to a broader set of challenges.